Rong Zou

I am currently a Research Assistant at the Robotics and Perception Group (RPG), under the supervision of Prof. Davide Scaramuzza.
My research interests lie at the intersection of computer vision, deep learning, and robotics, with a particular focus on enhancing the robustness of robotic perception systems in adverse conditions.
I earned my Master’s degree with distinction in Robotics, Systems, and Control from Eidgenössische Technische Hochschule Zürich (ETH Zurich).
Prior to my Masters, I received my bachelor’s degree with distinction in Engineering from Huazhong University of Science and Technology (HUST).
News
| Jul 1, 2024 | I am thrilled to share that our paper “Retrieval Robust to Object Motion Blur” has been accepted to the European Conference on Computer Vision (ECCV) 2024! |
|---|---|
| Mar 15, 2024 | I’m now part of the Computer Vision Lab at Huawei Zurich Research Center, working as a Computer Vision & Machine Learning Research Intern. I’m excited about the opportunities ahead. |
| Apr 28, 2023 | I’m happy to share that I’ve joined Computer Vision and Geometry Group (CVG) and have started my master’s thesis, exploring the topic of object retrieval. |
Publications
 | European Conference on Computer Vision (ECCV), 2024
A method and dataset for learning robust representations capable of bidirectional matching between motion-blurred objects and their deblurred counterparts. |
 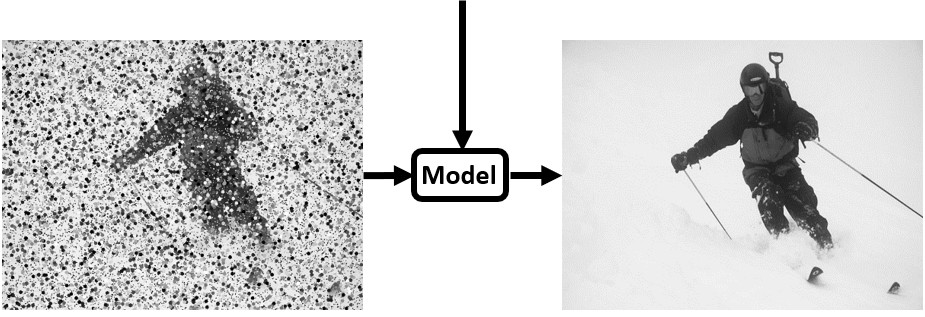 | arXiv, 2023
A data-driven approach to reconstruct the background from a single viewpoint in the presence of dynamic occlusions. |
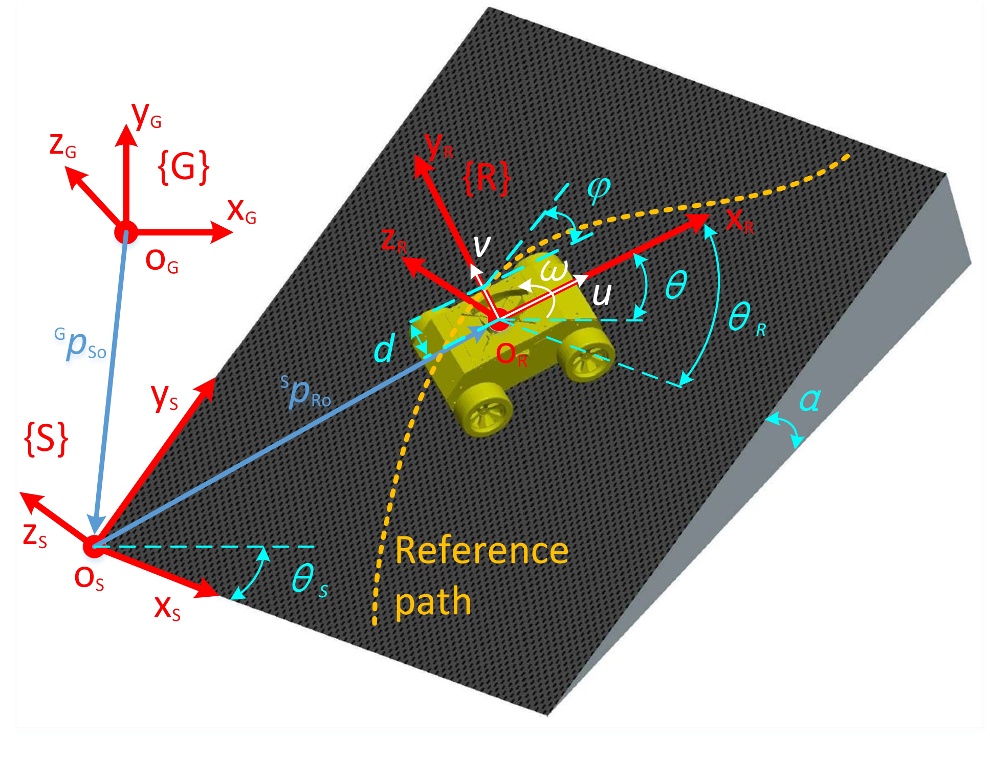 | International Journal of Control, Automation and Systems, 2022
An MPC strategy combined with a fuzzy system to enable a robot to track paths more accurately on slopes. |
Projects
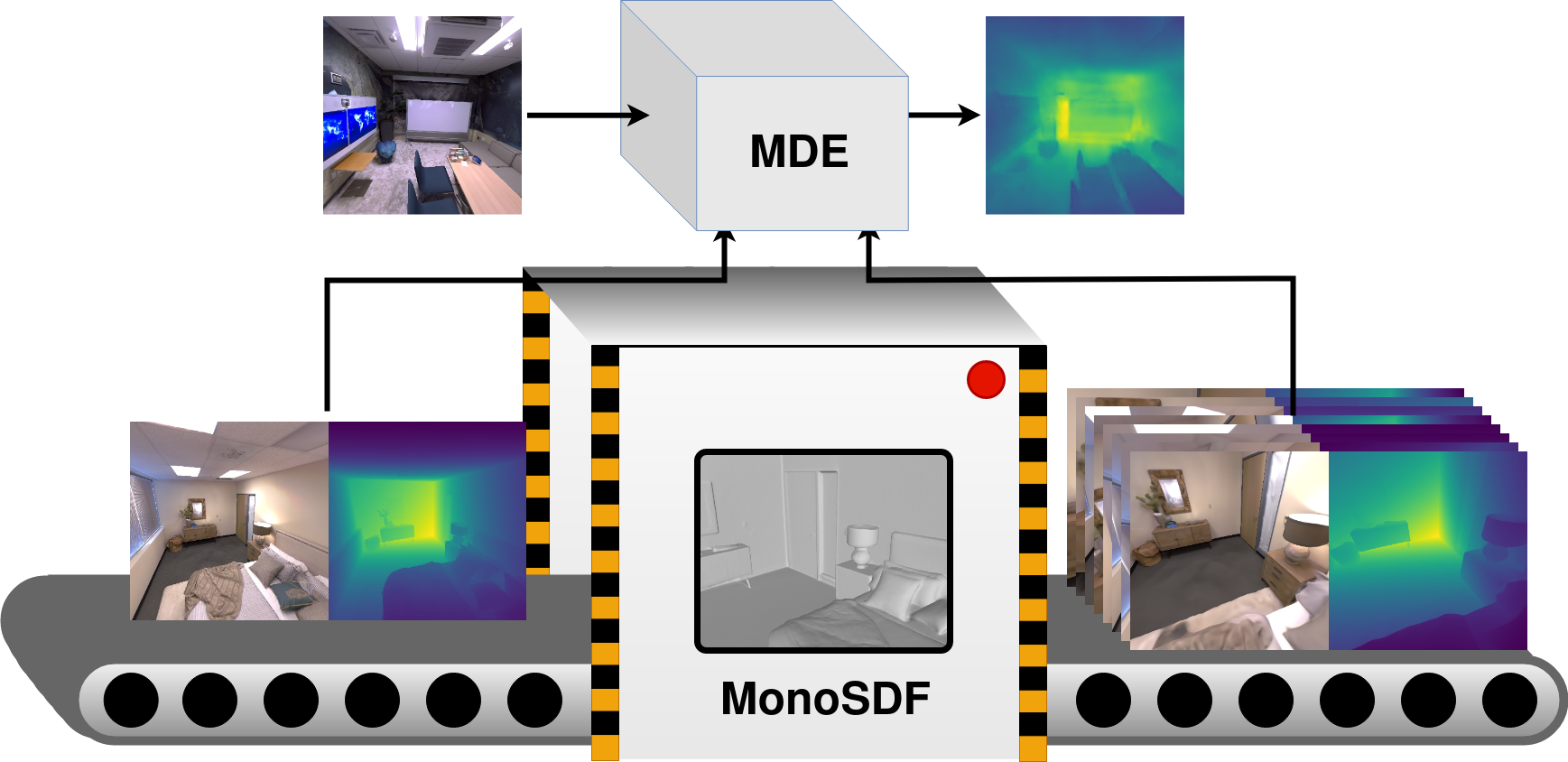 |
An approach to enhance the performance of existing supervised MDE methods by generating virtual views using e.g. MonoSDF as additional supervisory signals, circumventing the labour-intensive and time-consuming process of collecting extra data. |
 |
A comprehensive study of the impact of canonical transformations and training data augmentation via geometric transformations on the box refinement stage of a two-stage 3D object detection method for detecting cars in LiDAR data. |
 |
A complete visual odometry (VO) pipeline. Local (sliding-window bundle adjustment) and global (loop detection & correction) optimization were also implemented, which alleviates the scale drift and transforms the pipeline into a VSLAM framework. |
Experiences
 | Main tasks: development of learning-based algorithms to enhance the quality of images captured by mobile phone cameras, specifically focusing on image restoration and artifact removal. |
 | Main tasks: data processing, front-end and back-end real-time communication, real machine testing and deployment. |
 | Main tasks: improvement of robotic arm grasping planning algorithm, construction of robot grasping experimental platform, and grasping stability test on the real machine. |