Publications
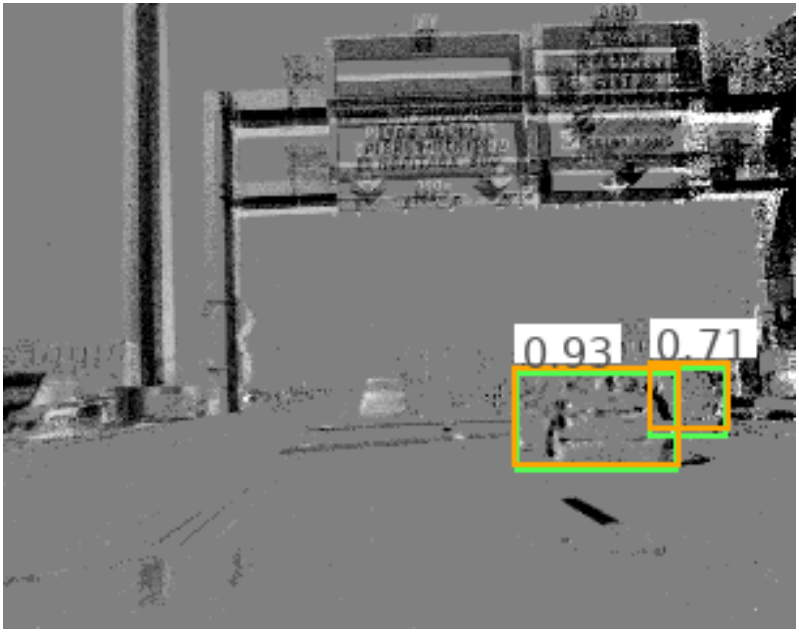
Low-latency Event-based Object Detection with Spatially-Sparse Linear Attention
Haiqing Hao, Zhipeng Sui, Rong Zou, Zijia Dai, Nikola Zubic, Davide Scaramuzza, Wenhui Wang
European Conference on Computer Vision (ECCV) 2026
A spatially sparse linear-attention model for low-latency object detection with event cameras.
FastEventDGS: Deformable Gaussian Splatting for Fast Dynamic Scenes from a Single Event Camera
Zijia Dai, Nico Messikommer, Rong Zou, Nikola Zubic, Davide Scaramuzza, Laurent Kneip
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
A deformable Gaussian splatting method for fast dynamic scene reconstruction from a single event camera.
Event-Aided Sharp Radiance Field Reconstruction for Fast-Flying Drones
Rong Zou*, Marco Cannici*, Davide Scaramuzza
IEEE Transactions on Robotics (TRO) 2026
A unified event-and-frame framework for sharp radiance field reconstruction from fast drone flights affected by motion blur and noisy pose estimates.

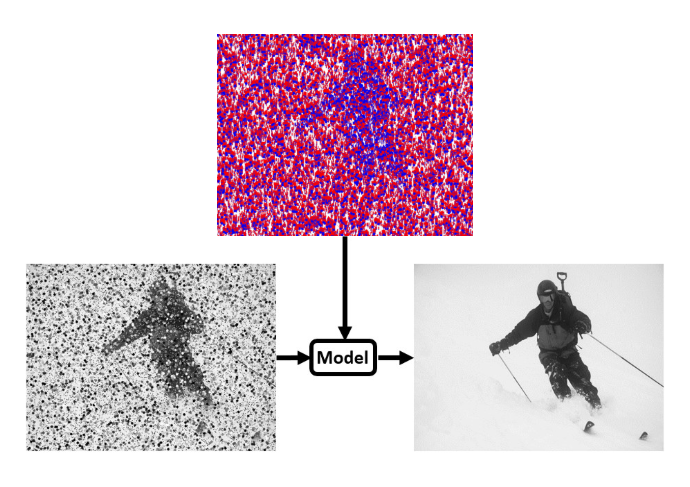
Retrieval Robust to Object Motion Blur
Rong Zou, Marc Pollefeys, Denys Rozumnyi
European Conference on Computer Vision (ECCV) 2024
A method and dataset for learning robust representations capable of bidirectional matching between motion-blurred objects and their deblurred counterparts.
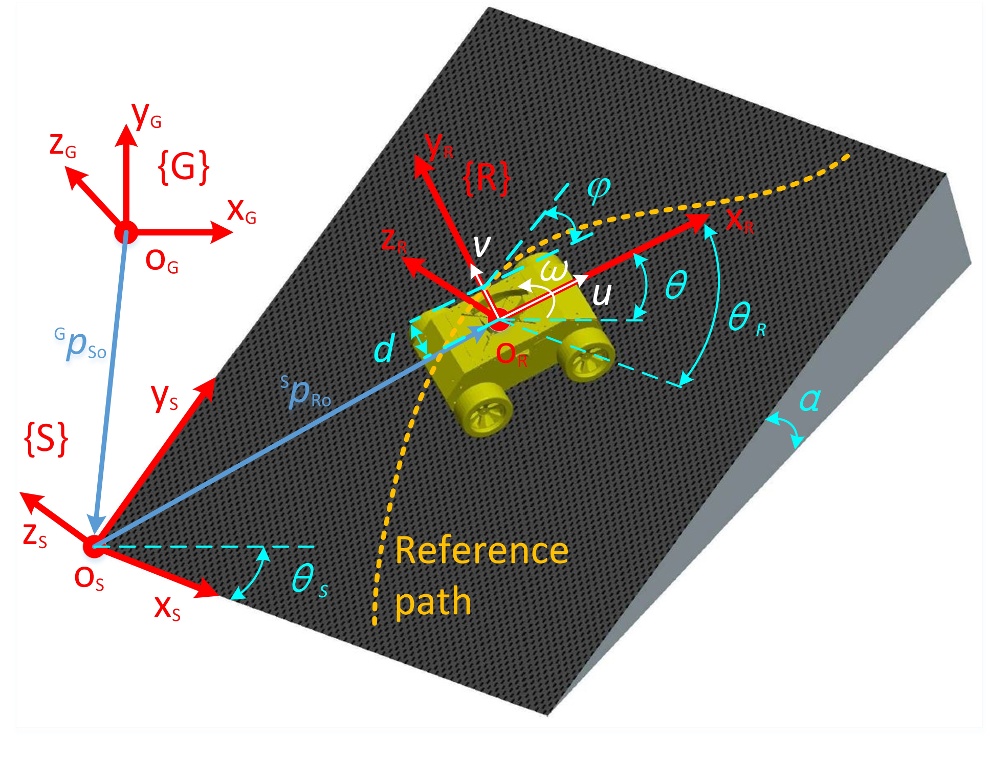
Path Tracking Control of Skid-steered Mobile Robot on Slope Based on Fuzzy System and Model Predictive Control
Xiao Yue, Jiankui Chen, Yiqun Li, Rong Zou, Zhihao Sun, Xiaochuan Cao, Song Zhang
International Journal of Control, Automation and Systems (IJCAS) 2022
A control strategy combining fuzzy systems and model predictive control to improve path tracking for skid-steered mobile robots on slopes.